一.产品概述
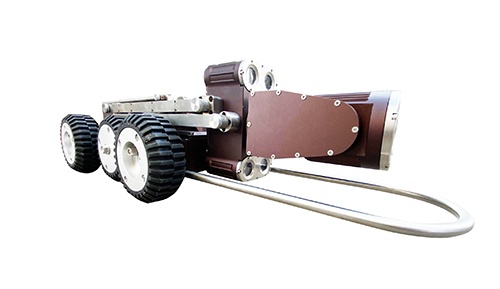
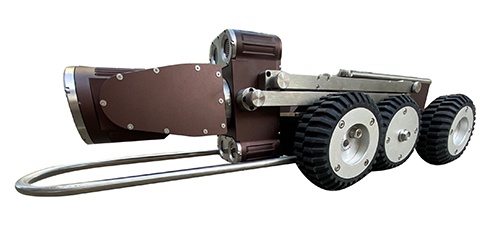
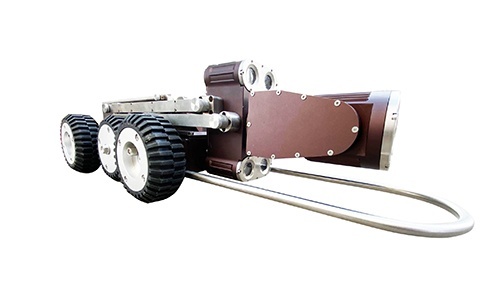
针对煤矿井下发生事故后,救援人员不能及时了解现场情况的问题,设计并研制了一种钻孔救援机器人,该产品是由爬行器(摄像头)、钻孔自动(手动)盘线车、无线系统控制器 (电脑端)、电源适配器等部分组成,通过操作主控制机器人界面,可实现控制爬行器在孔内行走,并将釆集到的救援孔内部图像通过线缆实时传输到主控制器进行实时监视,配合判图软件一键生成检测报告。检测系统还配有专业的控制软件,可运行在windowslO系统上控制本套检测机器人。可进行图像存储。监视图像时如果发现人与物体,可以通过录像或拍照记录出来以便对其判断、分析。在主控制器的显示界面上,可以随时了解爬行器的状态,包括倾角、气压、距离、速度、平台高度、日期等相关信息。该装置也可用于其他地质钻井探测中,基于矿山钻孔救援探测需求,针对现有探测机器人信息探测范围窄、探测距离较短、功能单一、无越障能力等问题,设计出矿山钻孔救援探测机器人。


 官方微信
官方微信 手机二维码
手机二维码